node_relative_path Class Reference
#include <node.hpp>
Detailed Description
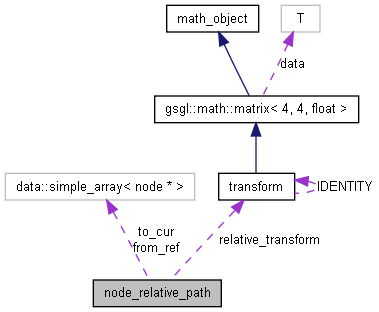
Stores the nodes in the scene graph needed to calculate the transform from src's frame to dest's.Definition at line 61 of file node.hpp.
Public Member Functions | |
| const math::transform & | calc_relative_transform (bool include_translation) |
| const math::transform & | get_relative_transform () const |
| void | initialize (node *reference, node *cur) |
| node_relative_path (node *reference, node *cur) | |
Private Attributes | |
| data::simple_array< node * > | from_ref |
| math::transform | relative_transform |
| data::simple_array< node * > | to_cur |
Constructor & Destructor Documentation
| node_relative_path | ( | node * | reference, | |
| node * | cur | |||
| ) |
Member Function Documentation
| const math::transform & calc_relative_transform | ( | bool | include_translation | ) |
Definition at line 97 of file node.cpp.
References node_relative_path::from_ref, transform::IDENTITY, node_relative_path::relative_transform, node_relative_path::to_cur, and transform::translation_transform().
| const math::transform& get_relative_transform | ( | ) | const [inline] |
Definition at line 72 of file node.cpp.
References node_relative_path::from_ref, gsgl::min_val(), simple_array::size(), and node_relative_path::to_cur.
Referenced by node_relative_path::node_relative_path().
Member Data Documentation
data::simple_array<node *> from_ref [private] |
Definition at line 64 of file node.hpp.
Referenced by node_relative_path::calc_relative_transform(), and node_relative_path::initialize().
math::transform relative_transform [private] |
Definition at line 66 of file node.hpp.
Referenced by node_relative_path::calc_relative_transform().
data::simple_array<node *> to_cur [private] |
Definition at line 63 of file node.hpp.
Referenced by node_relative_path::calc_relative_transform(), and node_relative_path::initialize().
The documentation for this class was generated from the following files: