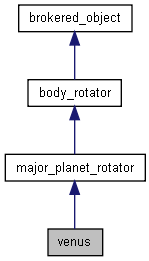
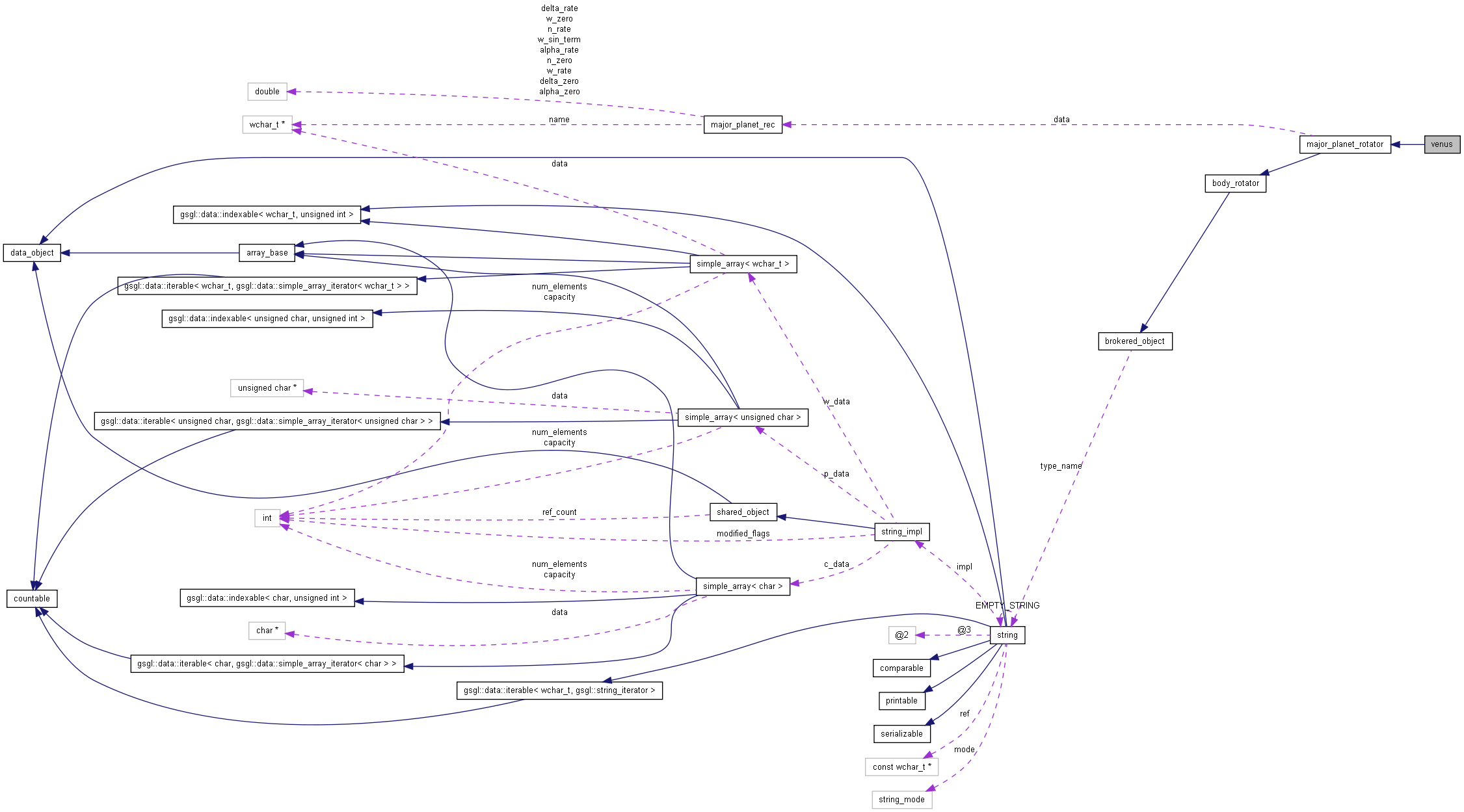
venus Class Reference
Detailed Description
Definition at line 199 of file rotating_body.cpp.
Public Member Functions | |
| BROKER_DECLARE_CREATOR (periapsis::space::rotator::venus::venus) | |
| virtual void | calc_orientation (double jdn, transform &orientation, vector &angular_velocity) |
| virtual const gsgl::string & | get_type_name () const |
| venus (const config_record &) | |
Protected Member Functions | |
| void | calc_angular_velocity_aux (double ang_diff, double d, const gsgl::math::transform &orientation, gsgl::math::vector &angular_velocity) |
| void | calc_orientation_aux (double alpha, double delta, double W, gsgl::math::transform &orientation) |
Constructor & Destructor Documentation
| venus | ( | const config_record & | ) | [inline] |
Definition at line 202 of file rotating_body.cpp.
Member Function Documentation
| BROKER_DECLARE_CREATOR | ( | periapsis::space::rotator::venus::venus | ) |
| void calc_angular_velocity_aux | ( | double | ang_diff, | |
| double | d, | |||
| const gsgl::math::transform & | orientation, | |||
| gsgl::math::vector & | angular_velocity | |||
| ) | [protected, inherited] |
Definition at line 78 of file rotating_body.cpp.
References gsgl::math::DEG2RAD, and gsgl::math::units::SECONDS_PER_DAY.
Referenced by callisto::calc_orientation(), ganymede::calc_orientation(), europa::calc_orientation(), io::calc_orientation(), deimos::calc_orientation(), phobos::calc_orientation(), moon::calc_orientation(), and major_planet_rotator::calc_orientation().
| void calc_orientation | ( | double | jdn, | |
| transform & | orientation, | |||
| vector & | angular_velocity | |||
| ) | [virtual, inherited] |
Implements body_rotator.
Definition at line 130 of file rotating_body.cpp.
References major_planet_rec::alpha_rate, major_planet_rec::alpha_zero, body_rotator::calc_angular_velocity_aux(), body_rotator::calc_orientation_aux(), major_planet_rotator::data, gsgl::math::DEG2RAD, major_planet_rec::delta_rate, major_planet_rec::delta_zero, periapsis::space::J2000, major_planet_rec::n_rate, major_planet_rec::n_zero, major_planet_rec::w_rate, major_planet_rec::w_sin_term, and major_planet_rec::w_zero.
| void calc_orientation_aux | ( | double | alpha, | |
| double | delta, | |||
| double | W, | |||
| gsgl::math::transform & | orientation | |||
| ) | [protected, inherited] |
Definition at line 54 of file rotating_body.cpp.
References gsgl::math::DEG2RAD, periapsis::space::EQUATORIAL_WRT_ECLIPTIC, and gsgl::math::PI_OVER_2.
Referenced by callisto::calc_orientation(), ganymede::calc_orientation(), europa::calc_orientation(), io::calc_orientation(), deimos::calc_orientation(), phobos::calc_orientation(), moon::calc_orientation(), and major_planet_rotator::calc_orientation().
| const gsgl::string & get_type_name | ( | ) | const [virtual, inherited] |
Definition at line 54 of file broker.cpp.
References countable::is_empty(), and brokered_object::type_name.
Referenced by node::draw_scene(), and simulation::update_node().
The documentation for this class was generated from the following file: