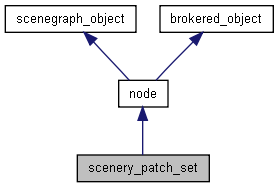
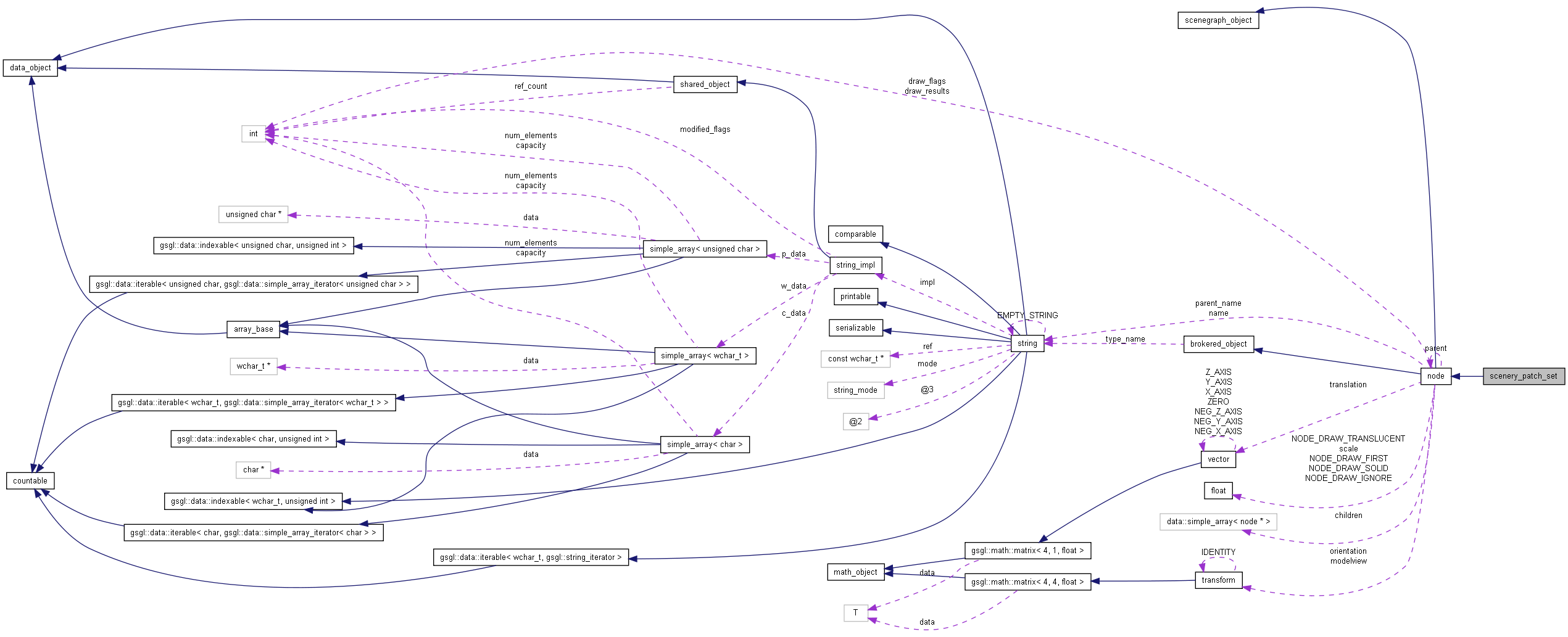
scenery_patch_set Class Reference
#include <scenery_patch_set.hpp>
Detailed Description
A dummy node that holds texture and height data for a planetary surface.Definition at line 49 of file scenery_patch_set.hpp.
Scene Graph Functionality. | |
| void | add_child (node *child) |
Add a child node. Also sets the child's parent to this. | |
| bool | connect (node *branch) |
| If this is called on the root of a scene graph, it will insert the branch node in the appropriate place in the graph, or return false. | |
| void | detach () |
| Removes the node from the scene graph (does not delete it!). | |
| gsgl::flags_t & | get_draw_flags () |
| const gsgl::flags_t & | get_draw_flags () const |
| gsgl::flags_t & | get_draw_results () |
| const gsgl::flags_t & | get_draw_results () const |
| enum | node_draw_flags { NODE_NO_DRAW_FLAGS = 0, NODE_NO_FRUSTUM_CHECK = 1 << 0, NODE_DUMMY_OBJECT = 1 << 2, NODE_DRAW_UNLIT = 1 << 3 } |
| Flags that control node drawing. More... | |
| enum | node_draw_results { NODE_NO_DRAW_RESULTS = 0, NODE_OFF_SCREEN = 1 << 0, NODE_DREW_POINT = 1 << 1, NODE_DISTANCE_CULLED = 1 << 2 } |
| Flags that indicate what happened when the node was drawn. More... | |
| static void | draw_scene (gsgl::scenegraph::context *c, pre_draw_rec &rec) |
| Draws a scene. Safe to call while update is also being called in the tree. | |
| static void | pre_draw_scene (gsgl::scenegraph::context *c, pre_draw_rec &rec) |
| Collect information about the scene to draw. Unsafe to call while update is being called in the tree. | |
Drawing Information Functions. | |
| virtual gsgl::real_t | default_view_distance () const |
| virtual gsgl::real_t | get_priority (gsgl::scenegraph::context *) |
| Called to determine the draw priority of the node. | |
| virtual gsgl::real_t | max_extent () const |
| Should return the maximum extent of the object (in the node's coordinates, i.e. not scaled to meters). | |
| virtual gsgl::real_t | minimum_view_distance () const |
| static const gsgl::real_t | NODE_DRAW_FIRST = FLT_MAX |
| static const gsgl::real_t | NODE_DRAW_IGNORE = 0.000f |
| static const gsgl::real_t | NODE_DRAW_SOLID = 0.001f |
| static const gsgl::real_t | NODE_DRAW_TRANSLUCENT = 0.002f |
Public Member Functions | |
| BROKER_DECLARE_CREATOR (periapsis::space::scenery_patch_set) | |
| virtual const gsgl::string & | get_type_name () const |
| scenery_patch_set (const gsgl::data::config_record &obj_config) | |
| virtual | ~scenery_patch_set () |
Node Life Cycle. | |
| virtual void | cleanup (gsgl::scenegraph::context *c) |
| Called when the simulation is done. | |
| virtual void | draw (gsgl::scenegraph::context *c) |
| Called to draw the node. The node's modelview matrix is in the correct state for drawing, and already loaded into the OpenGL modelview matrix. | |
| virtual bool | handle_event (gsgl::scenegraph::context *c, sg_event &e) |
| Called with events. | |
| virtual void | init (gsgl::scenegraph::context *c) |
| Called when the simulation is created. The node's modelview matrix is invalid at this point. | |
| virtual data::config_record * | save () const |
| Called to save the node to a config_record structure. | |
| virtual void | update (gsgl::scenegraph::context *c) |
| Called from the root of the world-tree up to update the node's state. The node's modelview matrix is that of the previously-drawn frame. | |
Accessors. | |
| data::simple_array< node * > & | get_children () |
| math::transform & | get_modelview () |
| string & | get_name () |
| const string & | get_name () const |
| math::transform & | get_orientation () |
| node *& | get_parent () |
| const node * | get_parent () const |
| string & | get_parent_name () |
| gsgl::real_t & | get_scale () |
| math::vector & | get_translation () |
Member Enumeration Documentation
enum node_draw_flags [inherited] |
enum node_draw_results [inherited] |
Constructor & Destructor Documentation
| scenery_patch_set | ( | const gsgl::data::config_record & | obj_config | ) |
Definition at line 50 of file scenery_patch_set.cpp.
| ~scenery_patch_set | ( | ) | [virtual] |
Definition at line 56 of file scenery_patch_set.cpp.
Member Function Documentation
| void add_child | ( | node * | child | ) | [inherited] |
Add a child node. Also sets the child's parent to this.
Definition at line 267 of file node.cpp.
References assert, node::children, and node::parent.
Referenced by node::connect(), application::load_objects(), application::load_scenery(), model::model(), node::node(), vehicle::vehicle(), and vehicle_module::vehicle_module().
| BROKER_DECLARE_CREATOR | ( | periapsis::space::scenery_patch_set | ) |
| void cleanup | ( | gsgl::scenegraph::context * | c | ) | [virtual, inherited] |
Called when the simulation is done.
Reimplemented in vehicle, submesh_node, checkered_box, large_lithosphere, large_rocky_body, spacecraft, and stellar_db.
Definition at line 319 of file node.cpp.
Referenced by vehicle::cleanup(), checkered_box::cleanup(), large_rocky_body::cleanup(), and simulation::cleanup_node().
| bool connect | ( | node * | branch | ) | [inherited] |
If this is called on the root of a scene graph, it will insert the branch node in the appropriate place in the graph, or return false.
Definition at line 289 of file node.cpp.
References node::add_child(), node::children, node::name, and node::parent_name.
Referenced by simulation::simulation().
| gsgl::real_t default_view_distance | ( | ) | const [virtual, inherited] |
Reimplemented in vehicle, checkered_box, celestial_body, and large_lithosphere.
Definition at line 255 of file node.cpp.
Referenced by large_lithosphere::default_view_distance(), and freeview::reset().
| void detach | ( | ) | [inherited] |
Removes the node from the scene graph (does not delete it!).
Definition at line 276 of file node.cpp.
References node::children, and node::parent.
| void draw | ( | gsgl::scenegraph::context * | c | ) | [virtual, inherited] |
Called to draw the node. The node's modelview matrix is in the correct state for drawing, and already loaded into the OpenGL modelview matrix.
Reimplemented in vehicle, submesh_node, test_frame, checkered_box, celestial_body, galaxy, large_lithosphere, large_rocky_body, planet_system, solar_system, spacecraft, star, and stellar_db.
Definition at line 311 of file node.cpp.
Referenced by vehicle::draw(), large_rocky_body::draw(), and node::draw_scene().
| void draw_scene | ( | gsgl::scenegraph::context * | c, | |
| pre_draw_rec & | rec | |||
| ) | [static, inherited] |
Draws a scene. Safe to call while update is also being called in the tree.
Definition at line 397 of file node.cpp.
References light::bind(), context::cam, CHECK_GL_ERRORS, node::draw(), node::draw_results, display::get_aspect_ratio(), camera::get_field_of_view(), display::get_height(), node::get_modelview(), brokered_object::get_type_name(), display::get_width(), gsgl::scenegraph::utils::is_on_screen(), node::pre_draw_rec::light_queue, vector::mag(), node::max_extent(), gsgl::max_val(), node::NODE_DISTANCE_CULLED, node::NODE_NO_DRAW_RESULTS, node::NODE_OFF_SCREEN, context::num_lights, node::pre_draw_rec::paint_queue, gsgl::scenegraph::utils::pos_in_eye_space(), matrix::ptr(), context::render_flags, context::RENDER_UNLIT, node::scale, context::screen, node::pre_draw_rec::solids, node::pre_draw_rec::translucents, and vector::ZERO.
Referenced by simulation::draw().
| data::simple_array< node * > & get_children | ( | ) | [inherited] |
Definition at line 174 of file node.cpp.
References node::children.
Referenced by simulation::cleanup_node(), node::get_name(), gsgl::scenegraph::utils::greatest_extent(), simulation::handle_event(), rigid_body::init(), simulation::init_node(), application::load_scenery(), sim_view_box::load_scenery_info(), application::remove_viewpoint_nodes(), planet_earth::update(), and simulation::update_node().
| gsgl::flags_t& get_draw_flags | ( | ) | [inline, inherited] |
| const gsgl::flags_t& get_draw_flags | ( | ) | const [inline, inherited] |
- Returns:
- The node's draw flags (a bitset using node_draw_flags).
Definition at line 150 of file node.hpp.
Referenced by large_rocky_body::draw(), celestial_body::draw(), galaxy::galaxy(), gsgl::scenegraph::utils::is_on_screen(), planet_system::planet_system(), solar_system::solar_system(), star::star(), and stellar_db::stellar_db().
| gsgl::flags_t& get_draw_results | ( | ) | [inline, inherited] |
| const gsgl::flags_t& get_draw_results | ( | ) | const [inline, inherited] |
- Returns:
- The node's draw results (a bitset using node_draw_results).
Definition at line 166 of file node.hpp.
Referenced by large_rocky_body::draw(), celestial_body::draw(), and large_lithosphere::update().
| math::transform & get_modelview | ( | ) | [inherited] |
Definition at line 230 of file node.cpp.
References node::modelview.
Referenced by gsgl::scenegraph::utils::dot_in_eye_space(), large_rocky_body::draw(), celestial_body::draw(), gsgl::scenegraph::utils::draw_billboard(), node::draw_scene(), gsgl::scenegraph::utils::is_on_screen(), spherical_quadtree::node_radius(), gsgl::scenegraph::utils::pos_in_eye_space(), spherical_quadtree::update(), and large_lithosphere::update().
| string & get_name | ( | ) | [inherited] |
| const string & get_name | ( | ) | const [inherited] |
Definition at line 182 of file node.cpp.
References string::format(), node::get_children(), node::get_name(), countable::is_empty(), node::name, and node::parent.
Referenced by vehicle::calculate_inertia_tensor(), solar_system::draw(), planet_system::draw(), celestial_body::draw_name(), gas_body::gas_body(), node::get_name(), planet_system::get_priority(), large_rocky_body::large_rocky_body(), sim_view_box::load_scenery_info(), model::model(), model_part::model_part(), simulation::simulation(), vehicle::vehicle(), and vehicle_module::vehicle_module().
| math::transform & get_orientation | ( | ) | [inherited] |
Definition at line 225 of file node.cpp.
References node::orientation.
Referenced by camera::camera(), rotating_body::init(), rigid_body::init(), test_frame::recalc(), freeview::reset(), freeview::rot_absolute(), freeview::rot_relative(), solar_system::solar_system(), rotating_body::update(), rigid_body::update(), freeview::update(), and vehicle::vehicle().
| node *& get_parent | ( | ) | [inherited] |
| const node * get_parent | ( | ) | const [inherited] |
Definition at line 162 of file node.cpp.
References node::parent.
Referenced by large_lithosphere::default_view_distance(), freeview::handle_event(), lithosphere::lithosphere(), large_lithosphere::max_extent(), large_lithosphere::minimum_view_distance(), freeview::reset(), and planet_earth::update().
| string & get_parent_name | ( | ) | [inherited] |
| gsgl::real_t get_priority | ( | gsgl::scenegraph::context * | ) | [virtual, inherited] |
Called to determine the draw priority of the node.
A value of NODE_DRAW_IGNORE means don't draw (invisible nodes or nodes that are drawn by their parents -- the modelview matrix is still built). A value of NODE_DRAW_SOLID means the object is solid and should be drawn after the painter's algorithm. A value of NODE_DRAW_TRANSLUCENT means the object is translucent and should be drawn after solid objects. A value > NODE_DRAW_TRANSLUCENT is interpreted as the distance to the object. Objects that return > 2.0 are drawn with a painter's algorithm.
Reimplemented in vehicle, submesh_node, test_frame, checkered_box, celestial_body, galaxy, large_lithosphere, large_rocky_body, planet_system, solar_system, and stellar_db.
Definition at line 243 of file node.cpp.
References node::NODE_DRAW_IGNORE.
Referenced by node::build_draw_list().
| gsgl::real_t & get_scale | ( | ) | [inherited] |
Definition at line 215 of file node.cpp.
References node::scale.
Referenced by stellar_db::draw(), gsgl::scenegraph::utils::greatest_extent(), and stellar_db::init().
| math::vector & get_translation | ( | ) | [inherited] |
Definition at line 220 of file node.cpp.
References node::translation.
Referenced by freeview::handle_event(), rigid_body::init(), orbital_frame::init(), freeview::reset(), rigid_body::update(), orbital_frame::update(), freeview::update(), planet_earth::update(), and vehicle::vehicle().
| const gsgl::string & get_type_name | ( | ) | const [virtual, inherited] |
Definition at line 54 of file broker.cpp.
References countable::is_empty(), and brokered_object::type_name.
Referenced by node::draw_scene(), and simulation::update_node().
| bool handle_event | ( | gsgl::scenegraph::context * | c, | |
| sg_event & | e | |||
| ) | [virtual, inherited] |
Called with events.
Reimplemented in freeview.
Definition at line 323 of file node.cpp.
Referenced by simulation::handle_event().
| void init | ( | gsgl::scenegraph::context * | c | ) | [virtual, inherited] |
Called when the simulation is created. The node's modelview matrix is invalid at this point.
Reimplemented in rigid_body, vehicle, submesh_node, test_frame, checkered_box, celestial_body, galaxy, large_lithosphere, large_rocky_body, orbital_frame, rotating_body, solar_system, spacecraft, star, and stellar_db.
Definition at line 307 of file node.cpp.
Referenced by simulation::init_node().
| gsgl::real_t max_extent | ( | ) | const [virtual, inherited] |
Should return the maximum extent of the object (in the node's coordinates, i.e. not scaled to meters).
Reimplemented in submesh_node, checkered_box, celestial_body, and large_lithosphere.
Definition at line 249 of file node.cpp.
Referenced by node::draw_scene(), gsgl::scenegraph::utils::greatest_extent(), large_lithosphere::max_extent(), and node::minimum_view_distance().
| gsgl::real_t minimum_view_distance | ( | ) | const [virtual, inherited] |
Reimplemented in vehicle, checkered_box, celestial_body, and large_lithosphere.
Definition at line 261 of file node.cpp.
References node::max_extent().
Referenced by freeview::handle_event(), and large_lithosphere::minimum_view_distance().
| void pre_draw_scene | ( | gsgl::scenegraph::context * | c, | |
| pre_draw_rec & | rec | |||
| ) | [static, inherited] |
Collect information about the scene to draw. Unsafe to call while update is being called in the tree.
Definition at line 380 of file node.cpp.
References node::build_draw_list(), context::cam, transform::IDENTITY, node::pre_draw_rec::light_queue, node::pre_draw_rec::paint_queue, node::pre_draw_rec::solids, and node::pre_draw_rec::translucents.
Referenced by simulation::pre_draw().
| data::config_record * save | ( | ) | const [virtual, inherited] |
| void update | ( | gsgl::scenegraph::context * | c | ) | [virtual, inherited] |
Called from the root of the world-tree up to update the node's state. The node's modelview matrix is that of the previously-drawn frame.
Reimplemented in rigid_body, vehicle, freeview, submesh_node, test_frame, checkered_box, planet_earth, large_lithosphere, large_rocky_body, orbital_frame, rotating_body, and spacecraft.
Definition at line 315 of file node.cpp.
Referenced by checkered_box::update(), and simulation::update_node().
Member Data Documentation
const gsgl::real_t NODE_DRAW_FIRST = FLT_MAX [static, inherited] |
Definition at line 218 of file node.hpp.
Referenced by stellar_db::get_priority(), solar_system::get_priority(), and galaxy::get_priority().
const gsgl::real_t NODE_DRAW_IGNORE = 0.000f [static, inherited] |
Definition at line 215 of file node.hpp.
Referenced by vehicle::get_priority(), planet_system::get_priority(), and node::get_priority().
const gsgl::real_t NODE_DRAW_SOLID = 0.001f [static, inherited] |
Definition at line 216 of file node.hpp.
Referenced by node::build_draw_list(), and submesh_node::get_priority().
const gsgl::real_t NODE_DRAW_TRANSLUCENT = 0.002f [static, inherited] |
Definition at line 217 of file node.hpp.
Referenced by node::build_draw_list(), checkered_box::get_priority(), and submesh_node::get_priority().
The documentation for this class was generated from the following files: