spacecraft Class Reference
#include <spacecraft.hpp>
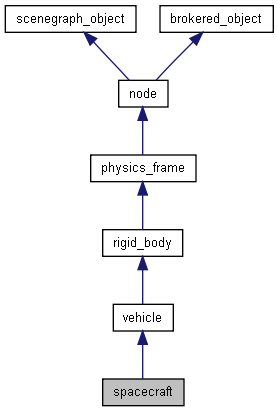
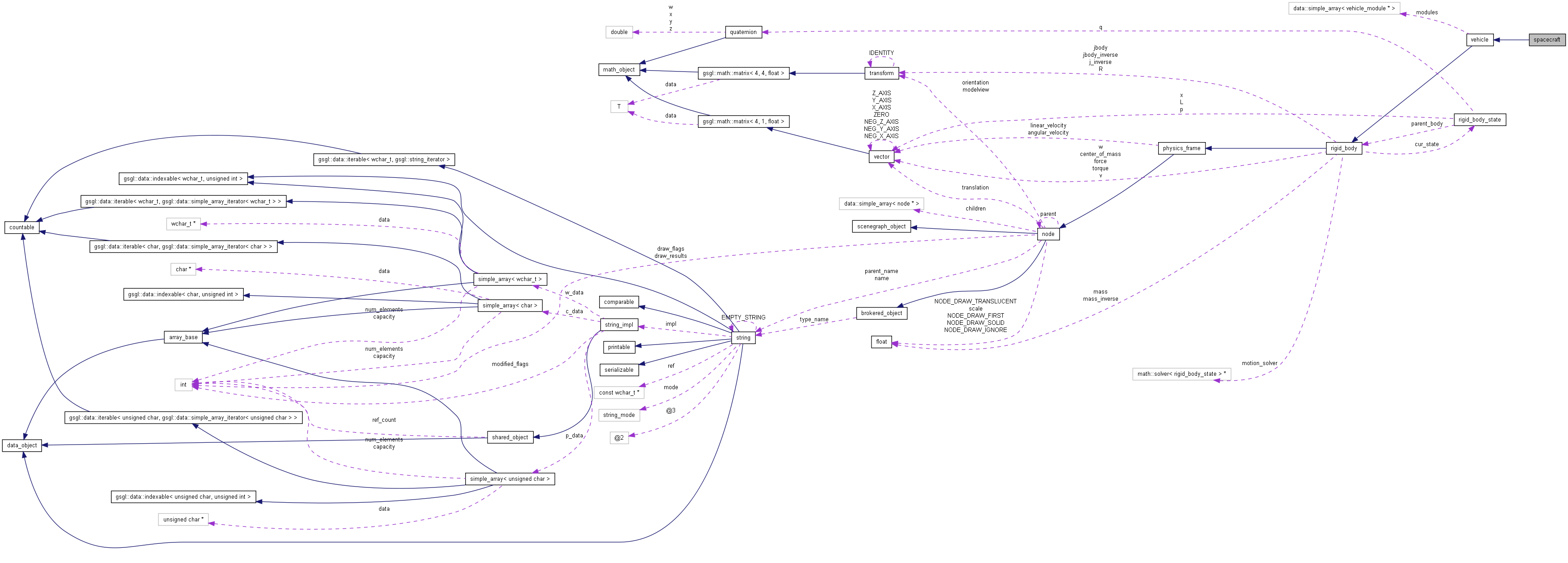
Detailed Description
Definition at line 57 of file spacecraft.hpp.
Scene Graph Functionality. | |
| void | add_child (node *child) |
Add a child node. Also sets the child's parent to this. | |
| bool | connect (node *branch) |
| If this is called on the root of a scene graph, it will insert the branch node in the appropriate place in the graph, or return false. | |
| void | detach () |
| Removes the node from the scene graph (does not delete it!). | |
| gsgl::flags_t & | get_draw_flags () |
| const gsgl::flags_t & | get_draw_flags () const |
| gsgl::flags_t & | get_draw_results () |
| const gsgl::flags_t & | get_draw_results () const |
| enum | node_draw_flags { NODE_NO_DRAW_FLAGS = 0, NODE_NO_FRUSTUM_CHECK = 1 << 0, NODE_DUMMY_OBJECT = 1 << 2, NODE_DRAW_UNLIT = 1 << 3 } |
| Flags that control node drawing. More... | |
| enum | node_draw_results { NODE_NO_DRAW_RESULTS = 0, NODE_OFF_SCREEN = 1 << 0, NODE_DREW_POINT = 1 << 1, NODE_DISTANCE_CULLED = 1 << 2 } |
| Flags that indicate what happened when the node was drawn. More... | |
| static void | draw_scene (gsgl::scenegraph::context *c, pre_draw_rec &rec) |
| Draws a scene. Safe to call while update is also being called in the tree. | |
| static void | pre_draw_scene (gsgl::scenegraph::context *c, pre_draw_rec &rec) |
| Collect information about the scene to draw. Unsafe to call while update is being called in the tree. | |
Drawing Information Functions. | |
| virtual gsgl::real_t | max_extent () const |
| Should return the maximum extent of the object (in the node's coordinates, i.e. not scaled to meters). | |
| static const gsgl::real_t | NODE_DRAW_FIRST = FLT_MAX |
| static const gsgl::real_t | NODE_DRAW_IGNORE = 0.000f |
| static const gsgl::real_t | NODE_DRAW_SOLID = 0.001f |
| static const gsgl::real_t | NODE_DRAW_TRANSLUCENT = 0.002f |
Public Member Functions | |
| BROKER_DECLARE_CREATOR (periapsis::space::spacecraft) | |
| virtual gsgl::math::transform | calculate_inertia_tensor (gsgl::math::vector ¢er_of_mass) |
| virtual gsgl::real_t | default_view_distance () const |
| math::vector & | get_angular_velocity () |
| math::vector & | get_linear_velocity () |
| const data::simple_array < vehicle_module * > & | get_modules () const |
| virtual gsgl::real_t | get_priority (gsgl::scenegraph::context *) |
| Called to determine the draw priority of the node. | |
| gsgl::real_t & | get_total_mass () |
| virtual const gsgl::string & | get_type_name () const |
| virtual gsgl::real_t | minimum_view_distance () const |
| spacecraft (const gsgl::data::config_record &obj_config) | |
| virtual | ~spacecraft () |
rigid_body implementation | |
| virtual void | calculate_force_and_torque (const double &t, gsgl::math::vector &force, gsgl::math::vector &torque) |
node implementation | |
| virtual void | cleanup (gsgl::scenegraph::context *c) |
| Called when the simulation is done. | |
| virtual void | draw (gsgl::scenegraph::context *c) |
| Called to draw the node. The node's modelview matrix is in the correct state for drawing, and already loaded into the OpenGL modelview matrix. | |
| virtual void | init (gsgl::scenegraph::context *c) |
| Called when the simulation is created. The node's modelview matrix is invalid at this point. | |
| virtual void | update (gsgl::scenegraph::context *c) |
| Called from the root of the world-tree up to update the node's state. The node's modelview matrix is that of the previously-drawn frame. | |
Accessors. | |
| data::simple_array< node * > & | get_children () |
| math::transform & | get_modelview () |
| string & | get_name () |
| const string & | get_name () const |
| math::transform & | get_orientation () |
| node *& | get_parent () |
| const node * | get_parent () const |
| string & | get_parent_name () |
| gsgl::real_t & | get_scale () |
| math::vector & | get_translation () |
Node Life Cycle. | |
| virtual bool | handle_event (gsgl::scenegraph::context *c, sg_event &e) |
| Called with events. | |
| virtual data::config_record * | save () const |
| Called to save the node to a config_record structure. | |
Protected Attributes | |
| math::vector | center_of_mass |
| rigid_body_state | cur_state |
| math::vector | force |
| math::transform | j_inverse |
| math::transform | jbody |
| math::transform | jbody_inverse |
| gsgl::real_t | mass |
| gsgl::real_t | mass_inverse |
| math::solver< rigid_body_state > * | motion_solver |
| math::transform | R |
| math::vector | torque |
| math::vector | v |
| math::vector | w |
Member Enumeration Documentation
enum node_draw_flags [inherited] |
enum node_draw_results [inherited] |
Constructor & Destructor Documentation
| spacecraft | ( | const gsgl::data::config_record & | obj_config | ) |
Definition at line 64 of file spacecraft.cpp.
| ~spacecraft | ( | ) | [virtual] |
Definition at line 70 of file spacecraft.cpp.
Member Function Documentation
| void add_child | ( | node * | child | ) | [inherited] |
Add a child node. Also sets the child's parent to this.
Definition at line 267 of file node.cpp.
References assert, node::children, and node::parent.
Referenced by node::connect(), application::load_objects(), application::load_scenery(), model::model(), node::node(), vehicle::vehicle(), and vehicle_module::vehicle_module().
| BROKER_DECLARE_CREATOR | ( | periapsis::space::spacecraft | ) |
| void calculate_force_and_torque | ( | const double & | t, | |
| gsgl::math::vector & | force, | |||
| gsgl::math::vector & | torque | |||
| ) | [virtual] |
- Note:
- Forces & torques are in world coordinates, and the time is in UNIX time (seconds)!
Implements rigid_body.
Definition at line 113 of file spacecraft.cpp.
| transform calculate_inertia_tensor | ( | gsgl::math::vector & | center_of_mass | ) | [virtual, inherited] |
Implements rigid_body.
Definition at line 159 of file vehicle.cpp.
References simple_array::append(), node::get_name(), vector::get_x(), vector::get_y(), vector::get_z(), transform::IDENTITY, rigid_body::mass, vehicle::modules, and simple_array::size().
| void cleanup | ( | gsgl::scenegraph::context * | c | ) | [virtual] |
Called when the simulation is done.
Reimplemented from vehicle.
Definition at line 107 of file spacecraft.cpp.
| bool connect | ( | node * | branch | ) | [inherited] |
If this is called on the root of a scene graph, it will insert the branch node in the appropriate place in the graph, or return false.
Definition at line 289 of file node.cpp.
References node::add_child(), node::children, node::name, and node::parent_name.
Referenced by simulation::simulation().
| gsgl::real_t default_view_distance | ( | ) | const [virtual, inherited] |
Reimplemented from node.
Definition at line 107 of file vehicle.cpp.
References vehicle::minimum_view_distance().
| void detach | ( | ) | [inherited] |
Removes the node from the scene graph (does not delete it!).
Definition at line 276 of file node.cpp.
References node::children, and node::parent.
| void draw | ( | gsgl::scenegraph::context * | c | ) | [virtual] |
Called to draw the node. The node's modelview matrix is in the correct state for drawing, and already loaded into the OpenGL modelview matrix.
Reimplemented from vehicle.
Definition at line 81 of file spacecraft.cpp.
| void draw_scene | ( | gsgl::scenegraph::context * | c, | |
| pre_draw_rec & | rec | |||
| ) | [static, inherited] |
Draws a scene. Safe to call while update is also being called in the tree.
Definition at line 397 of file node.cpp.
References light::bind(), context::cam, CHECK_GL_ERRORS, node::draw(), node::draw_results, display::get_aspect_ratio(), camera::get_field_of_view(), display::get_height(), node::get_modelview(), brokered_object::get_type_name(), display::get_width(), gsgl::scenegraph::utils::is_on_screen(), node::pre_draw_rec::light_queue, vector::mag(), node::max_extent(), gsgl::max_val(), node::NODE_DISTANCE_CULLED, node::NODE_NO_DRAW_RESULTS, node::NODE_OFF_SCREEN, context::num_lights, node::pre_draw_rec::paint_queue, gsgl::scenegraph::utils::pos_in_eye_space(), matrix::ptr(), context::render_flags, context::RENDER_UNLIT, node::scale, context::screen, node::pre_draw_rec::solids, node::pre_draw_rec::translucents, and vector::ZERO.
Referenced by simulation::draw().
| math::vector& get_angular_velocity | ( | ) | [inline, inherited] |
Definition at line 64 of file physics_frame.hpp.
Referenced by rotating_body::init(), rigid_body::init(), orbital_frame::init(), rotating_body::update(), rigid_body::update(), and orbital_frame::update().
| data::simple_array< node * > & get_children | ( | ) | [inherited] |
Definition at line 174 of file node.cpp.
References node::children.
Referenced by simulation::cleanup_node(), node::get_name(), gsgl::scenegraph::utils::greatest_extent(), simulation::handle_event(), rigid_body::init(), simulation::init_node(), application::load_scenery(), sim_view_box::load_scenery_info(), application::remove_viewpoint_nodes(), planet_earth::update(), and simulation::update_node().
| gsgl::flags_t& get_draw_flags | ( | ) | [inline, inherited] |
| const gsgl::flags_t& get_draw_flags | ( | ) | const [inline, inherited] |
- Returns:
- The node's draw flags (a bitset using node_draw_flags).
Definition at line 150 of file node.hpp.
Referenced by large_rocky_body::draw(), celestial_body::draw(), galaxy::galaxy(), gsgl::scenegraph::utils::is_on_screen(), planet_system::planet_system(), solar_system::solar_system(), star::star(), and stellar_db::stellar_db().
| gsgl::flags_t& get_draw_results | ( | ) | [inline, inherited] |
| const gsgl::flags_t& get_draw_results | ( | ) | const [inline, inherited] |
- Returns:
- The node's draw results (a bitset using node_draw_results).
Definition at line 166 of file node.hpp.
Referenced by large_rocky_body::draw(), celestial_body::draw(), and large_lithosphere::update().
| math::vector& get_linear_velocity | ( | ) | [inline, inherited] |
Definition at line 63 of file physics_frame.hpp.
Referenced by rotating_body::init(), rigid_body::init(), orbital_frame::init(), rotating_body::update(), rigid_body::update(), and orbital_frame::update().
| math::transform & get_modelview | ( | ) | [inherited] |
Definition at line 230 of file node.cpp.
References node::modelview.
Referenced by gsgl::scenegraph::utils::dot_in_eye_space(), large_rocky_body::draw(), celestial_body::draw(), gsgl::scenegraph::utils::draw_billboard(), node::draw_scene(), gsgl::scenegraph::utils::is_on_screen(), spherical_quadtree::node_radius(), gsgl::scenegraph::utils::pos_in_eye_space(), spherical_quadtree::update(), and large_lithosphere::update().
| const data::simple_array<vehicle_module *>& get_modules | ( | ) | const [inline, inherited] |
Definition at line 61 of file vehicle.hpp.
| string & get_name | ( | ) | [inherited] |
| const string & get_name | ( | ) | const [inherited] |
Definition at line 182 of file node.cpp.
References string::format(), node::get_children(), node::get_name(), countable::is_empty(), node::name, and node::parent.
Referenced by vehicle::calculate_inertia_tensor(), solar_system::draw(), planet_system::draw(), celestial_body::draw_name(), gas_body::gas_body(), node::get_name(), planet_system::get_priority(), large_rocky_body::large_rocky_body(), sim_view_box::load_scenery_info(), model::model(), model_part::model_part(), simulation::simulation(), vehicle::vehicle(), and vehicle_module::vehicle_module().
| math::transform & get_orientation | ( | ) | [inherited] |
Definition at line 225 of file node.cpp.
References node::orientation.
Referenced by camera::camera(), rotating_body::init(), rigid_body::init(), test_frame::recalc(), freeview::reset(), freeview::rot_absolute(), freeview::rot_relative(), solar_system::solar_system(), rotating_body::update(), rigid_body::update(), freeview::update(), and vehicle::vehicle().
| node *& get_parent | ( | ) | [inherited] |
| const node * get_parent | ( | ) | const [inherited] |
Definition at line 162 of file node.cpp.
References node::parent.
Referenced by large_lithosphere::default_view_distance(), freeview::handle_event(), lithosphere::lithosphere(), large_lithosphere::max_extent(), large_lithosphere::minimum_view_distance(), freeview::reset(), and planet_earth::update().
| string & get_parent_name | ( | ) | [inherited] |
| gsgl::real_t get_priority | ( | gsgl::scenegraph::context * | ) | [virtual, inherited] |
Called to determine the draw priority of the node.
A value of NODE_DRAW_IGNORE means don't draw (invisible nodes or nodes that are drawn by their parents -- the modelview matrix is still built). A value of NODE_DRAW_SOLID means the object is solid and should be drawn after the painter's algorithm. A value of NODE_DRAW_TRANSLUCENT means the object is translucent and should be drawn after solid objects. A value > NODE_DRAW_TRANSLUCENT is interpreted as the distance to the object. Objects that return > 2.0 are drawn with a painter's algorithm.
Reimplemented from node.
Definition at line 101 of file vehicle.cpp.
References node::NODE_DRAW_IGNORE.
| gsgl::real_t & get_scale | ( | ) | [inherited] |
Definition at line 215 of file node.cpp.
References node::scale.
Referenced by stellar_db::draw(), gsgl::scenegraph::utils::greatest_extent(), and stellar_db::init().
| gsgl::real_t& get_total_mass | ( | ) | [inline, inherited] |
Definition at line 104 of file rigid_body.hpp.
| math::vector & get_translation | ( | ) | [inherited] |
Definition at line 220 of file node.cpp.
References node::translation.
Referenced by freeview::handle_event(), rigid_body::init(), orbital_frame::init(), freeview::reset(), rigid_body::update(), orbital_frame::update(), freeview::update(), planet_earth::update(), and vehicle::vehicle().
| const gsgl::string & get_type_name | ( | ) | const [virtual, inherited] |
Definition at line 54 of file broker.cpp.
References countable::is_empty(), and brokered_object::type_name.
Referenced by node::draw_scene(), and simulation::update_node().
| bool handle_event | ( | gsgl::scenegraph::context * | c, | |
| sg_event & | e | |||
| ) | [virtual, inherited] |
Called with events.
Reimplemented in freeview.
Definition at line 323 of file node.cpp.
Referenced by simulation::handle_event().
| void init | ( | gsgl::scenegraph::context * | c | ) | [virtual] |
Called when the simulation is created. The node's modelview matrix is invalid at this point.
Reimplemented from vehicle.
Definition at line 75 of file spacecraft.cpp.
| gsgl::real_t max_extent | ( | ) | const [virtual, inherited] |
Should return the maximum extent of the object (in the node's coordinates, i.e. not scaled to meters).
Reimplemented in submesh_node, checkered_box, celestial_body, and large_lithosphere.
Definition at line 249 of file node.cpp.
Referenced by node::draw_scene(), gsgl::scenegraph::utils::greatest_extent(), large_lithosphere::max_extent(), and node::minimum_view_distance().
| gsgl::real_t minimum_view_distance | ( | ) | const [virtual, inherited] |
Reimplemented from node.
Definition at line 113 of file vehicle.cpp.
References gsgl::scenegraph::utils::greatest_extent().
Referenced by vehicle::default_view_distance().
| void pre_draw_scene | ( | gsgl::scenegraph::context * | c, | |
| pre_draw_rec & | rec | |||
| ) | [static, inherited] |
Collect information about the scene to draw. Unsafe to call while update is being called in the tree.
Definition at line 380 of file node.cpp.
References node::build_draw_list(), context::cam, transform::IDENTITY, node::pre_draw_rec::light_queue, node::pre_draw_rec::paint_queue, node::pre_draw_rec::solids, and node::pre_draw_rec::translucents.
Referenced by simulation::pre_draw().
| data::config_record * save | ( | ) | const [virtual, inherited] |
| void update | ( | gsgl::scenegraph::context * | c | ) | [virtual] |
Called from the root of the world-tree up to update the node's state. The node's modelview matrix is that of the previously-drawn frame.
Reimplemented from vehicle.
Definition at line 90 of file spacecraft.cpp.
References context::cur_time, and context::start_time.
Member Data Documentation
math::vector center_of_mass [protected, inherited] |
rigid_body_state cur_state [protected, inherited] |
Definition at line 84 of file rigid_body.hpp.
Referenced by rigid_body::compute_derived_quantities(), rigid_body::init(), rigid_body::rigid_body(), and rigid_body::update().
math::vector force [protected, inherited] |
math::transform j_inverse [protected, inherited] |
Definition at line 92 of file rigid_body.hpp.
Referenced by rigid_body::compute_derived_quantities(), and rigid_body_state::derivative().
math::transform jbody [protected, inherited] |
math::transform jbody_inverse [protected, inherited] |
Definition at line 81 of file rigid_body.hpp.
Referenced by rigid_body::compute_derived_quantities(), and rigid_body::init().
gsgl::real_t mass [protected, inherited] |
Definition at line 80 of file rigid_body.hpp.
Referenced by vehicle::calculate_inertia_tensor(), and rigid_body::init().
gsgl::real_t mass_inverse [protected, inherited] |
Definition at line 80 of file rigid_body.hpp.
Referenced by rigid_body::compute_derived_quantities(), rigid_body_state::derivative(), and rigid_body::init().
math::solver<rigid_body_state>* motion_solver [protected, inherited] |
Definition at line 98 of file rigid_body.hpp.
Referenced by rigid_body::rigid_body(), and rigid_body::update().
const gsgl::real_t NODE_DRAW_FIRST = FLT_MAX [static, inherited] |
Definition at line 218 of file node.hpp.
Referenced by stellar_db::get_priority(), solar_system::get_priority(), and galaxy::get_priority().
const gsgl::real_t NODE_DRAW_IGNORE = 0.000f [static, inherited] |
Definition at line 215 of file node.hpp.
Referenced by vehicle::get_priority(), planet_system::get_priority(), and node::get_priority().
const gsgl::real_t NODE_DRAW_SOLID = 0.001f [static, inherited] |
Definition at line 216 of file node.hpp.
Referenced by node::build_draw_list(), and submesh_node::get_priority().
const gsgl::real_t NODE_DRAW_TRANSLUCENT = 0.002f [static, inherited] |
Definition at line 217 of file node.hpp.
Referenced by node::build_draw_list(), checkered_box::get_priority(), and submesh_node::get_priority().
math::transform R [protected, inherited] |
Definition at line 88 of file rigid_body.hpp.
Referenced by rigid_body::compute_derived_quantities(), rigid_body::init(), and rigid_body::update().
math::vector torque [protected, inherited] |
math::vector v [protected, inherited] |
Definition at line 89 of file rigid_body.hpp.
Referenced by rigid_body::compute_derived_quantities(), and rigid_body::update().
math::vector w [protected, inherited] |
Definition at line 90 of file rigid_body.hpp.
Referenced by rigid_body::compute_derived_quantities(), and rigid_body::update().
The documentation for this class was generated from the following files: